터틀봇3 알아보기.
리모트 PC에서 처음 해보면 이것 밖에 없다.
$ ros2 node list
/turtlebot3_node
터틀봇에서 bringup 을 띄운다음 해보면
ubuntu@ubuntu:~$ ros2 launch turtlebot3_bringup robot.launch.py
몇개 노드가 더 생긴것을 볼 수 있다. 이것만 있는건 아니고 아직 실행 안된것도 많다.
그냥 연습삼아 현재 상태에서 이것저것 찍어본다.
$ ros2 node list
/diff_drive_controller
/hlds_laser_publisher
/robot_state_publisher
/turtlebot3_node
지금은 이런 상태. (rqt_graph 로 확인)

$ ros2 topic list -t
/battery_state [sensor_msgs/msg/BatteryState]
/cmd_vel [geometry_msgs/msg/Twist]
/imu [sensor_msgs/msg/Imu]
/joint_states [sensor_msgs/msg/JointState]
/magnetic_field [sensor_msgs/msg/MagneticField]
/odom [nav_msgs/msg/Odometry]
/parameter_events [rcl_interfaces/msg/ParameterEvent]
/robot_description [std_msgs/msg/String]
/rosout [rcl_interfaces/msg/Log]
/scan [sensor_msgs/msg/LaserScan]
/sensor_state [turtlebot3_msgs/msg/SensorState]
/tf [tf2_msgs/msg/TFMessage]
/tf_static [tf2_msgs/msg/TFMessage]
$ ros2 service list -t
/diff_drive_controller/describe_parameters [rcl_interfaces/srv/DescribeParameters]
/diff_drive_controller/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
/diff_drive_controller/get_parameters [rcl_interfaces/srv/GetParameters]
/diff_drive_controller/list_parameters [rcl_interfaces/srv/ListParameters]
/diff_drive_controller/set_parameters [rcl_interfaces/srv/SetParameters]
/diff_drive_controller/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
/hlds_laser_publisher/describe_parameters [rcl_interfaces/srv/DescribeParameters]
/hlds_laser_publisher/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
/hlds_laser_publisher/get_parameters [rcl_interfaces/srv/GetParameters]
/hlds_laser_publisher/list_parameters [rcl_interfaces/srv/ListParameters]
/hlds_laser_publisher/set_parameters [rcl_interfaces/srv/SetParameters]
/hlds_laser_publisher/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
/motor_power [std_srvs/srv/SetBool]
/reset [std_srvs/srv/Trigger]
/robot_state_publisher/describe_parameters [rcl_interfaces/srv/DescribeParameters]
/robot_state_publisher/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
/robot_state_publisher/get_parameters [rcl_interfaces/srv/GetParameters]
/robot_state_publisher/list_parameters [rcl_interfaces/srv/ListParameters]
/robot_state_publisher/set_parameters [rcl_interfaces/srv/SetParameters]
/robot_state_publisher/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
/rqt_gui_py_node_18723/describe_parameters [rcl_interfaces/srv/DescribeParameters]
/rqt_gui_py_node_18723/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
/rqt_gui_py_node_18723/get_parameters [rcl_interfaces/srv/GetParameters]
/rqt_gui_py_node_18723/list_parameters [rcl_interfaces/srv/ListParameters]
/rqt_gui_py_node_18723/set_parameters [rcl_interfaces/srv/SetParameters]
/rqt_gui_py_node_18723/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
/sound [turtlebot3_msgs/srv/Sound]
/turtlebot3_node/describe_parameters [rcl_interfaces/srv/DescribeParameters]
/turtlebot3_node/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
/turtlebot3_node/get_parameters [rcl_interfaces/srv/GetParameters]
/turtlebot3_node/list_parameters [rcl_interfaces/srv/ListParameters]
/turtlebot3_node/set_parameters [rcl_interfaces/srv/SetParameters]
/turtlebot3_node/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
$ ros2 param list
/diff_drive_controller:
odometry.child_frame_id
odometry.frame_id
odometry.publish_tf
odometry.use_imu
use_sim_time
Exception while calling service of node '/hlds_laser_publisher': None
/robot_state_publisher:
ignore_timestamp
publish_frequency
robot_description
use_sim_time
use_tf_static
/rqt_gui_py_node_18723:
use_sim_time
/turtlebot3_node:
motors.profile_acceleration
motors.profile_acceleration_constant
opencr.baud_rate
opencr.id
opencr.protocol_version
sensors.bumper_1
sensors.bumper_2
sensors.illumination
sensors.ir
sensors.sonar
use_sim_time
wheels.radius
wheels.separation
움직여보기
리모트PC에서 키보드 조작으로 움직일 수 있다.
$ ros2 run turtlebot3_teleop teleop_keyboard
Control Your TurtleBot3!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26)
a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
w,a,s,d,x 를 누르면 움직인다.
움직이면서
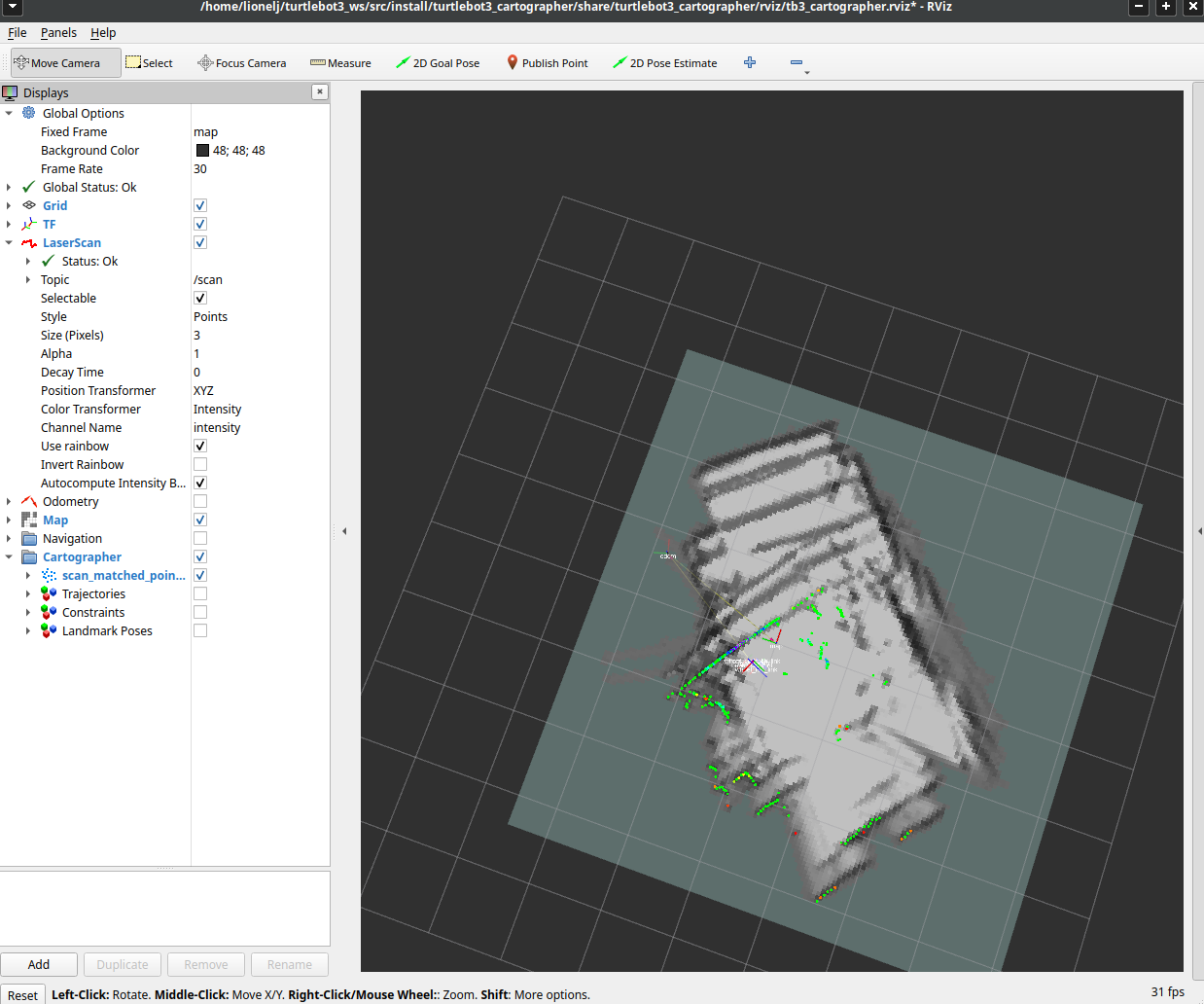
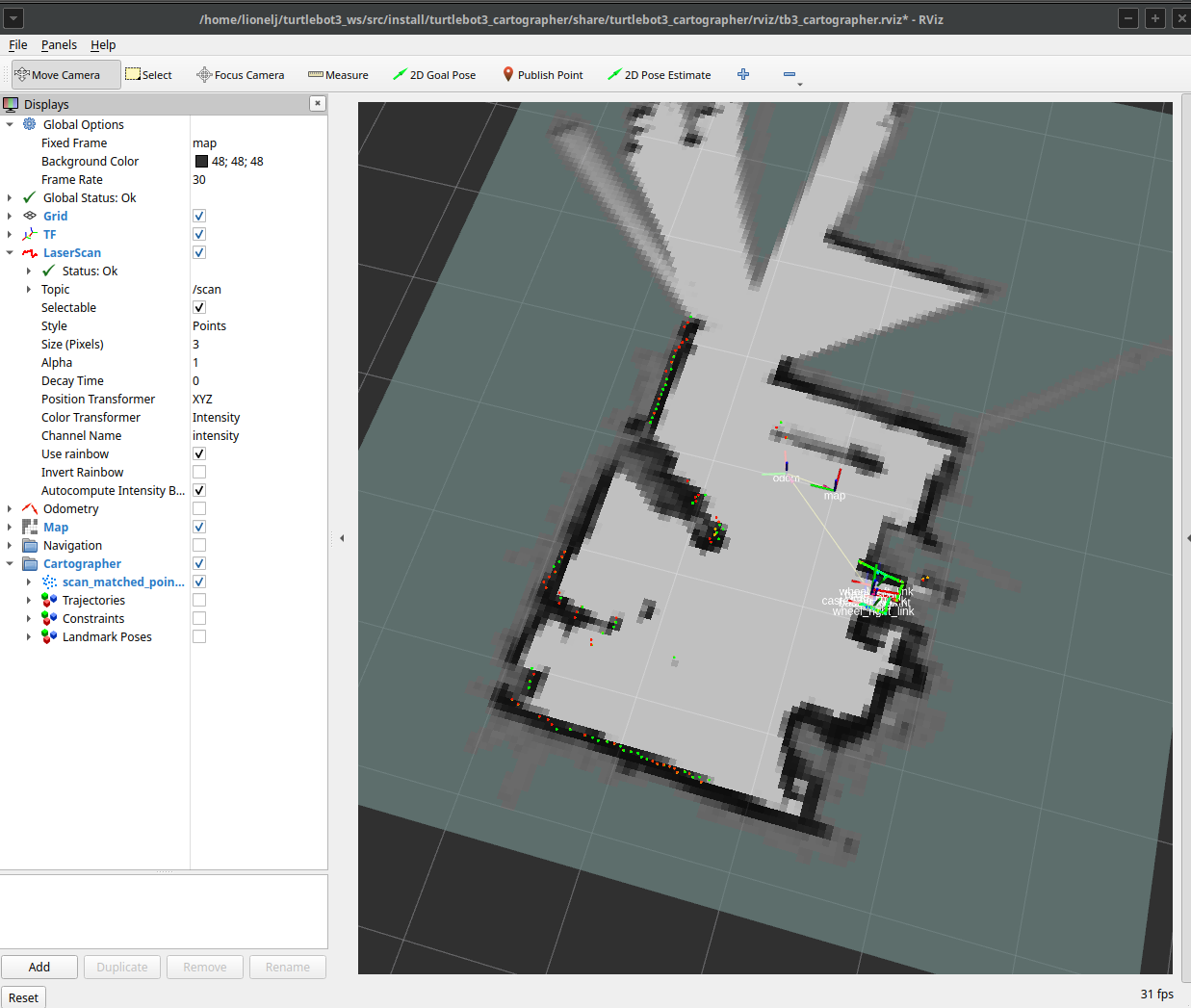
cartographer를 실행하면 맵을 만들 수 있다.
$ ros2 launch turtlebot3_cartographer cartographer.launch.py

이렇게 리모트PC에서 띄워놓고 움직이면 맵이 만들어진다.
만들어진 맵을 저장하려면
$ ros2 run nav2_map_server map_saver_cli -f ~/map
이렇게 하면 ~/map.pgm 이랑 ~/map.yaml 파일이 만들어진다.
-f 옵션뒤에 이름을 지정한것이다.
저장한 맵은 이런식으로 불러올 수 있다.
$ ros2 launch turtlebot3_navigation2 navigation2.launch.py map:=$HOME/map.yaml

$ ros2 doctor
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3 has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_teleop has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_bringup has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_node has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_navigation2 has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_example has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_description has been updated to a new version. local: 2.1.0 < required: 2.1.1
/opt/ros/foxy/lib/python3.8/site-packages/ros2doctor/api/package.py: 112: UserWarning: turtlebot3_cartographer has been updated to a new version. local: 2.1.0 < required: 2.1.1
DynamixelSDK, turtlebot3, turtlebot3_msgs 를 update 하고 colcon build 해준다.
다시 조립을 제대로 하고 돌려보면
turtlebot3/
turtlebot3_bringup/
├── 99-turtlebot3-cdc.rules <== udev ruls 파일
├── CHANGELOG.rst
├── CMakeLists.txt
├── launch
│ ├── robot.launch.py <== 로봇 런쳐 파일. 관련된 런처들을 띄운다. 아래에 기본 파라메터 파일을 전달한다. 이 안에서 turtlebot3_state_publisher와 hlds_laser를 또 띄운다. turtlebot3_node 패키지를 띄운다.
│ ├── rviz2.launch.py
│ └── turtlebot3_state_publisher.launch.py <== 터틀봇 urdf 파일을 로딩하고 robot_state_publisher 패키지를 띄운다.
├── package.xml
└── param
├── burger.yaml <== 버거 로봇 기본 설정 파일. opencr baudrate, 바퀴, 모터, 센서, odometry 등의 기본 설정. 파라메터로 들어간다.
├── waffle.yaml
└── waffle_pi.yaml
turtlebot3_cartographer/
turtlebot3_description/ <== 터틀봇의 외형에 관한 데이터들 urdf, stl, rviz 파일들이 들어있다.
turtlebot3_example/
turtlebot3_navigation2/
turtlebot3_node/
├── CHANGELOG.rst
├── CMakeLists.txt
├── include
│ └── turtlebot3_node
│ ├── control_table.hpp
│ ├── devices
│ │ ├── devices.hpp
│ │ ├── motor_power.hpp
│ │ ├── reset.hpp
│ │ └── sound.hpp
│ ├── diff_drive_controller.hpp
│ ├── dynamixel_sdk_wrapper.hpp
│ ├── odometry.hpp
│ ├── sensors
│ │ ├── battery_state.hpp
│ │ ├── imu.hpp
│ │ ├── joint_state.hpp
│ │ ├── sensor_state.hpp
│ │ └── sensors.hpp
│ └── turtlebot3.hpp
├── package.xml
├── param
│ ├── burger.yaml
│ ├── waffle.yaml
│ └── waffle_pi.yaml
└── src
├── devices
│ ├── motor_power.cpp
│ ├── reset.cpp
│ └── sound.cpp
├── diff_drive_controller.cpp
├── dynamixel_sdk_wrapper.cpp
├── node_main.cpp
├── odometry.cpp
├── sensors
│ ├── battery_state.cpp
│ ├── imu.cpp
│ ├── joint_state.cpp
│ └── sensor_state.cpp
└── turtlebot3.cpp
turtlebot3_teleop/
├── CHANGELOG.rst
├── package.xml
├── resource
│ └── turtlebot3_teleop
├── setup.cfg
├── setup.py
└── turtlebot3_teleop
├── __init__.py <<== 해당 디렉토리가 패키지의 일부임을 표시하는 파일
├── __pycache__
│ └── __init__.cpython-38.pyc
└── script
├── __init__.py
├── __pycache__
│ ├── __init__.cpython-38.pyc
│ └── teleop_keyboard.cpython-38.pyc
└── teleop_keyboard.py <<== 키를 입력받아서 angular 와 linear 값을 publish 한다.
'Embeded > ROS' 카테고리의 다른 글
| RPLidar A1 을 터틀봇3 turtlebot3 에 붙이는 방법. (0) | 2021.01.26 |
|---|---|
| ROS2 action 만들기 (0) | 2021.01.13 |
| ROS2 ros2doctor (0) | 2021.01.13 |



